RECOGNIZAR ROBOCAR – Rev 1.a

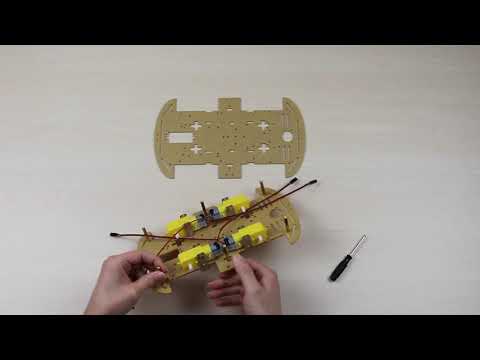
MONTAGE
Im folgenden Montagevideo zeigen wir euch wie das Fahrzeug zusammengebaut wird. Ebenso wird gezeigt wie man die Erweiterungen aus unserem Bausatz anbringt.
Achtung: Der Raspberry Pi und die Kamera sind nicht im Bausatz enthalten! Beim Verwenden der Software Digitizar benötigt man einen Raspberry Pi 4 Computer, mit mindestens 4GB RAM. Dazu ein Raspberry Pi Camera Module V2.
Betriebssystem
Zur Verwendung von Digitizar muss das Raspberry Pi OS (64-Bit – Codename Trixie) installiert werden. Ein Image mit vorinstallierten Programmen erhält man unter: Raspberry Pi OS (64 Bit). Wählen Sie z.B. Raspberry Pi OS with desktop.
Anmerkung: Seit Dezember 2025 unterstützen wir nur noch die 64-Bit Architektur der Debian 13 Trixie Variante des Raspberry Pi OS.
Bei Raspberry Pi OS – Debian Trixie ist die Navigation zu den Einstellungen wie folgt: Einstellungen > Control Centre -> Interfaces -> I2C -> On .
Hardware Setup
Damit die Hardware funktioniert müssen die Schnittstellen für die Kamera (MIPI CSI) und den I2C-Bus aktiviert werden:

SOFTWARE-INSTALLATION
Benötigte Softwarepakete
Ist WiringPi installiert können Sie diesen Punkt überspringen.
Anmerkung: Aktuell wird WiringPi nicht mehr von Raspberry Pi OS bereitgestellt. Beispielsweise benötigt das Modul UltraSonic diese Bibliothek für den Betrieb. Wir stellen das Debian-Paket bereit. Falls Sie das Paket selber erzeugen wollen finden sie den Sourcecode hier: WiringPi (Unofficial Mirror/Fork).
Laden Sie die Debian-Pakete herunter:
Download: wiringpi_3.4_arm64.deb
Öffnen Sie ein Terminal (z.B. LXTerminal). Installieren Sie die Pakete mit:
cd Downloads
sudo dpkg -i wiringpi_3.4_arm64.deb
Digitizar installieren
Laden Sie Digitizar auf ihren Raspberry Pi herunter.
Download: digitizar_20260403-1_arm64.deb
Öffnen Sie eine Konsole zur Installation von Paketabhängigkeiten und dem heruntergeladenen Paket:
Installieren Sie die Paketabhängigkeiten und das Paket im Terminal (z.B. LXTerminal) mit:
sudo apt install libqt5opengl5 libqt5serialport5 libqt5multimedia5 libqt5multimediawidgets5 libopencv-dev libgstreamer1.0-0 gstreamer1.0-plugins-bad
cd Downloads
sudo dpkg -i digitizar_20260403-1_arm64.deb

DIGITIZAR START
Mit dem Startmenüeintrag [Entwicklung] -> [Digitizar] wird das Programm gestartet.
Für den ersten Test laden wir das Programm „CheckLEDs.dar“ ein. Dazu geht man in der Menüleiste auf [File] -> [Open]. Im Filedialog „CheckLEDs.dar“ auswählen.

DIGITIZAR BEDIENOBERFLÄCHE
In folgendem Video zeigen wir euch die Steuerelemente zur Bedienung von Digitizar.
MOTORKALIBRIERUNG
Das folgendem Video zeigt, wie man die Motoren nach dem Zusammenbau überprüfen und kalibrieren kann.

FARBKALIBRIERUNG
Im Video wird gezeigt, wie man für die aktuelle Beleuchtung die HSV-Werte für einen farbigen Marker ermittelt.
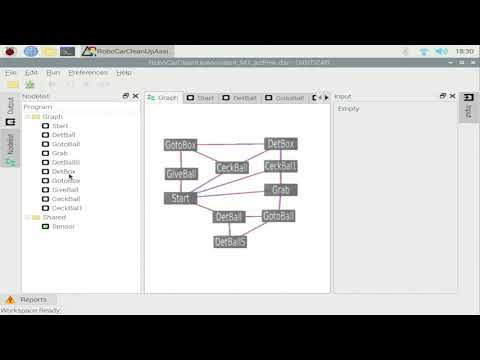
PROGRAMM-MODELLIERUNG
In folgendem Video wird gezeigt wie man mit Digitizar ein Programm erstell, bei dem der Roboter zu einem Ball fährt und diesen fängt.